Motion Options
Motion Options Panel (default keyboard shortcut M)
When an item in Layout is selected, clicking the Motion Options button opens a panel containing various controls for the selected item.

- Parent Item - This dropdown menu allows you to parent the current item to any other item in the list excluding bones, which can only be parented to another bone belonging to the same object or to the object they belong to.
- Target Item - This brings up a list of items that will allow the currently selected item to target or point at.
- Pole Item - Sets up a link to another item (often a null) that will be used as a Pole Vector. Pole Vectors are to the item’s Bank as Targets are to the Heading and Pitch.
- Spline Control - Determines the Spline Control element that will be used for the selected item.
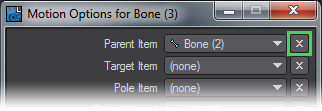
After each of these controls there is an X icon. This is used to rapidly de-reference the Parent, Target, Pole and/or Spline Control items without needing to go into the dropdown menu and selecting (none), although that option remains available.
IK and Modifiers Tab
- Unaffected by IK of Descendents - This option is used to define the root of an IK chain. It acts as an anchor for IK based motions and stops the motion from passing back beyond that item.
- Goal Object - This is an item which is usually the “handle” at the end of an IK chain. This handle serves the same function as a control rod on the end of a muppet’s arm or the strings on a puppet.
- Objective Menu - This menu selects how the item uses the goal. The default is Go to Goal , which the familiar way of trying to get the item to be as close to the goal as possible. Point at Goal is similar to targeting in that it aims to make the items Z-axis point at the goal. YZ Plane through Goal the IK solver will attempt to get the YZ plane of the effector to go through the goal position. This menu is only available when a Goal Object is selected and in turn it makes the Goal Strength field available.
- Goal Strength - This option is used to determine how much the end of the IK chain follows or is attracted to the goal object. This is particularly important when using multigoal IK chains. One goal for example could be used to control the placement of a leg/foot and another to determine the orientation of a knee joint. You would want the goal at the end of the leg to have a greater goal strength then the one at the knee. Sometimes this takes a little tuning to get right. With a character that is modelled to human scale, goal strengths from 30 -100 work well. Interestingly enough the smaller the character the larger the goal strength and the bigger the character the smaller the the goal strength needed.
- Base on... - Four choices are presented:
- Base on First Keyframe -
- Base on Most Recent Keyframe -
- Base on Current Time -
- Base on Frame Number - Makes the field next to this dropdown available for adding a frame number, which can be enveloped
- Chain - Activates the IK/FK blending options for the entire chain.
- IK/FK Blending - Will blend the calculations for inverse kinematics and the keyframes for forward kinematics based on the percentage, with 100% being full FK.
Soft IK
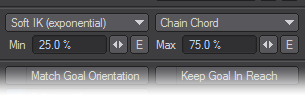
Soft IK can be used with the Go To Goal objective. Its purpose is to smooth out the transition from a bent chain to a straightened out chain. It does this by changing the position of the goal that the chain uses, moving it closer to the chain root. Three types of Soft IK are available from the dropdown that each offer different ways of treating the transition. Experimentation is necessary to see which of Exponential, Linear and Clamp work best for your specific needs.
The threshold at which it starts to do this is set by the Max value. If the distance between the chain root and the goal is larger than that indicated, the soft IK will kick in smoothly.
There are three ways to specify what “the distance between the chain root and the goal” means:
- Chain Chord - the Max value is given as a percentage of the straight-line distance between the chain root and the goal.
- Chain Length - the Max value is given as a percentage of the distance between the chain root and the goal, as measured along the chain.
- Given Lengths - the Max value is used as the distance.
Additionally, as well as a soft IK on stretching the chain, there is a soft IK on squashing the chain as well. If the distance between root and goal is less than a given minimum value, then it will start to push the goal away.
- Full-time IK - When this option is off, IK is not calculated full-time. This means that animating the goal object will have no effect on the items with IK active. The goal object will affect the IK items while posing. The items that are part of the IK chain will have to be keyframed manually. In this mode the Goal object acts as an aid to pose the IK chain. When this option is turned on, as it is by default, IK is calculated full-time.
This allows the goal object to be used to animate with full-time and the items in the IK chain do not need to be keyframed.
- Match Goal Orientation - As stated before the Goal object acts as a sort of handle or the control rod on the end of a muppet’s arm. By turning on match goal, the last bone in the IK chain will match its orientation to that of the goal objects. This allows things like a foot or hand to stay locked in place rather then pivot around the goal object.
- Keep Goal Within Reach - It is possible for the goal object to move away from its IK chain once it exceeds the length of the chain. This is normal but can be disconcerting to some people. If this option is turned on, the goal object will always stay at the end of the IK chain.